Velocity and Relative Motion
Article objectives
Types of Motion
If you had to think consciously in order to move your body, you would be severely disabled. Even walking, which we consider to be no great feat, requires an intricate series of motions that your cerebrum would be utterly incapable of coordinating. The task of putting one foot in front of the other is controlled by the more primitive parts of your brain, the ones that have not changed much since the mammals and reptiles went their separate evolutionary ways. The thinking part of your brain limits itself to general directives such as "walk faster," or "don't step on her toes," rather than micromanaging every contraction and relaxation of the hundred or so muscles of your hips, legs, and feet.
Physics is all about the conscious understanding of motion, but we're obviously not immediately prepared to understand the most complicated types of motion. Instead, we'll use the divide-and- conquer technique. We'll first classify the various types of motion, and then begin our campaign with an attack on the simplest cases. To make it clear what we are and are not ready to consider, we need to examine and define carefully what types of motion can exist.
Rigid-body motion distinguished from motion that changes an object’s shape
Nobody, with the possible exception of Fred Astaire, can simply glide forward without bending their joints. Walking is thus an example in which there is both a general motion of the whole object and a change in the shape of the object. Another example is the motion of a jiggling water balloon as it through the air. We are not presently attempting a mathematical description of the way in which the shape of an object changes. Motion without a change in shape is called rigid-body motion. (The word "body" is often used in physics as a synonym for "object.")

Figure a: Rotation

Figure b: Simultaneous rotation and motion through space.

Figure c: One person might say that the tipping chair was only rotating in a circle about its point of contact with the floor, but another could describe it as having both rotation and motion through space.
Center-of-mass motion as opposed to rotation
A ballerina leaps into the air and spins around once before landing. We feel intuitively that her rigid-body motion while her feet are off the ground consists of two kinds of motion going on simultaneously: a rotation and a motion of her body as a whole through space, along an arc. It is not immediately obvious, however, what is the most useful way to define the distinction between rotation and motion through space. Imagine that you attempt to balance a chair and it falls over. One person might say that the only motion was a rotation about the chair's point of contact with the floor, but another might say that there was both rotation and motion down and to the side.

Figure d: The leaping dancer's motion is complicated, but the motion of her center of mass is simple.
It turns out that there is one particularly natural and useful way to make a clear definition, but it requires a brief digression. Every object has a balance point, referred to in physics as the center of mass. For a two-dimensional object such as a cardboard cutout, the center of mass is the point at which you could hang the object from a string and make it balance. In the case of the ballerina (who is likely to be three-dimensional unless her diet is particularly severe), it might be a point either inside or outside her body, depending on how she holds her arms. Even if it is not practical to attach a string to the balance point itself, the center of mass can be defined as shown in figure e.
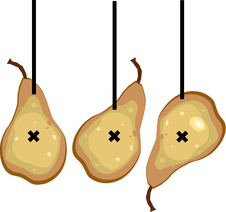
Figure e: No matter what point you hang the pear from, the string lines up with the pear's center of mass. The center of mass can therefore be defined as the intersection of all the lines made by hanging the pear in this way. Note that the X in the figure should not be interpreted as implying that the center of mass is on the surface --- it is actually inside the pear.
Why is the center of mass concept relevant to the question of classifying rotational motion as opposed to motion through space? As illustrated in figures d and g, it turns out that the motion of an object's center of mass is nearly always far simpler than the motion of any other part of the object. The ballerina's body is a large object with a complex shape. We might expect that her motion would be much more complicated than the motion of a small, simply-shaped object, say a marble, thrown up at the same angle as the angle at which she leapt. But it turns out that the motion of the ballerina's center of mass is exactly the same as the motion of the marble. That is, the motion of the center of mass is the same as the motion the ballerina would have if all her mass was concentrated at a point. By restricting our attention to the motion of the center of mass, we can therefore simplify things greatly.
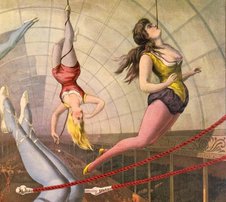
Figure f: The circus performers hang with the ropes passing through their centers of mass.
We can now replace the ambiguous idea of "motion as a whole through space" with the more useful and better defined concept of "center-of-mass motion." The motion of any rigid body can be cleanly split into rotation and center-of-mass motion. By this definition, the tipping chair does have both rotational and center-of-mass motion. Concentrating on the center of mass motion allows us to make a simplified model of the motion, as if a complicated object like a human body was just a marble or a point-like particle. Science really never deals with reality; it deals with models of reality.

Figure g: The same leaping dancer, viewed from above. Her center of mass traces a straight line, but a point away from her center of mass, such as her elbow, traces the much more complicated path shown by the dots.
Note that the word "center" in "center of mass" is not meant to imply that the center of mass must lie at the geometrical center of an object. A car wheel that has not been balanced properly has a center of mass that does not coincide with its geometrical center. An object such as the human body does not even have an obvious geometrical center.
It can be helpful to think of the center of mass as the average location of all the mass in the object. With this interpretation, we can see for example that raising your arms above your head raises your center of mass, since the higher position of the arms' mass raises the average.
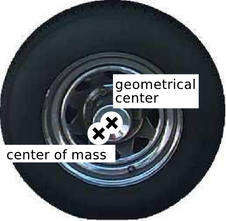
Figure h: An improperly balanced wheel has a center of mass that is not at its geometric center. When you get a new tire, the mechanic clamps little weights to the rim to balance the wheel.
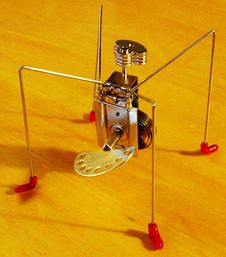
Figure i: This toy was intentionally designed so that the mushroom-shaped piece of metal on top would throw off the center of mass. When you wind it up, the mushroom spins, but the center of mass doesn't want to move, so the rest of the toy tends to counter the mushroom's motion, causing the whole thing to jump around.

Figure j: A fixed point on the dancer's body follows a trajectory that is flatter than what we expect, creating an illusion of flight.
Ballerinas and professional basketball players can create an illusion of flying horizontally through the air because our brains intuitively expect them to have rigid-body motion, but the body does not stay rigid while executing a grand jete or a slam dunk. The legs are low at the beginning and end of the jump, but come up higher at the middle. Regardless of what the limbs do, the center of mass will follow the same arc, but the low position of the legs at the beginning and end means that the torso is higher compared to the center of mass, while in the middle of the jump it is lower compared to the center of mass. Our eye follows the motion of the torso and tries to interpret it as the center-of-mass motion of a rigid body. But since the torso follows a path that is flatter than we expect, this attempted interpretation fails, and we experience an illusion that the person is flying horizontally.
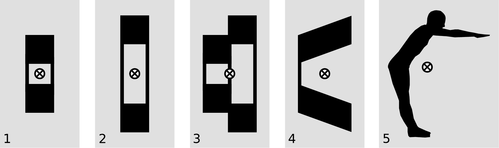
Figure k: Example 1

Figure l: The high-jumper's body passes over the bar, but his center of mass passes under it.

Figure m
Example 1
Explain how we know that the center of mass of each object is at the location shown in figure k.
The center of mass is a sort of average, so the height of the centers of mass in 1 and 2 has to be midway between the two squares, because that height is the average of the heights of the two squares. Image 3 is a combination of examples 1 and 2, so we can find its center of mass by averaging the horizontal positions of their centers of mass. In image 4, each square has been skewed a little, but just as much mass has been moved up as down, so the average vertical position of the mass hasn’t changed. Image 5 is clearly not all that different from image 4, the main difference being a slight clockwise rotation, so just as in image 4, the center of mass must be hanging in empty space, where there isn’t actually any mass. Horizontally, the center of mass must be between the heels and toes, or else it wouldn’t be possible to stand without tipping over.
Another interesting example from the sports world is the high jump, in which the jumper's curved body passes over the bar, but the center of mass passes under the bar! Here the jumper lowers his legs and upper body at the peak of the jump in order to bring his waist higher compared to the center of mass. Later, we'll find that there are more fundamental reasons (based on Newton's laws of motion) why the center of mass behaves in such a simple way compared to the other parts of an object. We're also postponing any discussion of numerical methods for finding an object's center of mass. Until later, we will only deal with the motion of objects' centers of mass.
Center-of-mass motion in one dimension
In addition to restricting our study of motion to center-of-mass motion, we will begin by considering only cases in which the center of mass moves along a straight line. This will include cases such as objects falling straight down, or a car that speeds up and slows down but does not turn.
Note that even though we are not explicitly studying the more complex aspects of motion, we can still analyze the center-of-mass motion while ignoring other types of motion that might be occurring simultaneously. For instance, if a cat is falling out of a tree and is initially upside-down, it goes through a series of contortions that bring its feet under it. This is definitely not an example of rigid-body motion, but we can still analyze the motion of the cat's center of mass just as we would for a dropping rock.
Describing distance and time
Center-of-mass motion in one dimension is particularly easy to deal with because all the information about it can be encapsulated in two variables: x, the position of the center of mass relative to the origin, and t, which measures a point in time. For instance, if someone supplied you with a sufficiently detailed table of x and t values, you would know pretty much all there was to know about the motion of the object's center of mass.
A point in time as opposed to duration
In ordinary speech, we use the word "time" in two different senses, which are to be distinguished in physics. It can be used, as in "a short time" or "our time here on earth," to mean a length or duration of time, or it can be used to indicate a clock reading, as in "I didn't know what time it was," or "now's the time." In symbols, t is ordinarily used to mean a point in time, while t signifies an interval or duration in time. The capital Greek letter delta, \(\Delta{}\), means "the change in...," i.e. a duration in time is the change or difference between one clock reading and another. The notation \(\Delta{}\)t does not signify the product of two numbers, \(\Delta{}\) and t, but rather one single number, t. If a matinee begins at a point in time t = 1 o'clock and ends at t = 3 o'clock, the duration of the movie was the change in t,
$$ \Delta{ }t = 3 \; hours - 1 \; hour = 2 \; hours$$
To avoid the use of negative numbers for \(\Delta{}\) t, we write the clock reading "after" to the left of the minus sign, and the clock reading "before" to the right of the minus sign. A more specific definition of the delta notation is therefore that delta stands for "after minus before."
Even though our definition of the delta notation guarantees that t is positive, there is no reason why \(\Delta{}\)t can't be negative. If t could not be negative, what would have happened one second before t = 0? That doesn't mean that time "goes backward" in the sense that adults can shrink into infants and retreat into the womb. It just means that we have to pick a reference point and call it t = 0, and then times before that are represented by negative values of t. An example is that a year like 2007 A.D. can be thought of as a positive t value, while one like 370 B.C. is negative. Similarly, when you hear a countdown for a rocket launch, the phrase "t minus ten seconds" is a way of saying t = -10 s, where t = 0 is the time of blastoff, and t > 0 refers to times after launch.
Although a point in time can be thought of as a clock reading, it is usually a good idea to avoid doing computations with expressions such as "2:35" that are combinations of hours and minutes. Times can instead be expressed entirely in terms of a single unit, such as hours. Fractions of an hour can be represented by decimals rather than minutes, and similarly if a problem is being worked in terms of minutes, decimals can be used instead of seconds.
Position as opposed to change in position
As with time, a distinction should be made between a point in space, symbolized as a coordinate x, and a change in position, symbolized as \(\Delta{}\)x.
As with t, x can be negative. If a train is moving down the tracks, not only do you have the freedom to choose any point along the tracks and call it x = 0, but it's also up to you to decide which side of the \(\Delta{}\)x = 0 point is positive x and which side is negative x.
Since we've defined the delta notation to mean /after minus before," it is possible that \(\Delta{}\)x will be negative, unlike \(\Delta{}\)t which is guaranteed to be positive. Suppose we are describing the motion of a train on tracks linking Tucson and Chicago. As shown in the figure, it is entirely up to you to decide which way is positive.

Figure n: Two equally valid ways of describing the motion of a train from Tucson to Chicago. In image 1, the train has a positive Δ x as it goes from Enid to Joplin. In 2, the same train going forward in the same direction has a negative Δ x.
Note that in addition to x and \(\Delta{}\)x, there is a third quantity we could define, which would be like an odometer reading, or actual distance traveled. If you drive 10 miles, make a U-turn, and drive back 10 miles, then your \(\Delta{}\)x is zero, but your car's odometer reading has increased by 20 miles. However important the odometer reading is to car owners and used car dealers, it is not very important in physics, and there is not even a standard name or notation for it. The change in position, \(\Delta{}\)x, is more useful because it is so much easier to calculate: to compute \(\Delta{}\)x, we only need to know the beginning and ending positions of the object, not all the information about how it got from one position to the other.
Frames of reference
The figure above shows that there are two arbitrary choices you have to make in order to define a position variable, x. You have to decide where to put x = 0, and also which direction will be positive. This is referred to as choosing a coordinate system or choosing a frame of reference. (The two terms are nearly synonymous, but the first focuses more on the actual x variable, while the second is more of a general way of referring to one's point of view.) As long as you are consistent, any frame is equally valid. You just don't want to change coordinate systems in the middle of a calculation.
Have you ever been sitting in a train in a station when suddenly you notice that the station is moving backward? Most people would describe the situation by saying that you just failed to notice that the train was moving --- it only seemed like the station was moving. But this shows that there is yet a third arbitrary choice that goes into choosing a coordinate system: valid frames of reference can differ from each other by moving relative to one another. It might seem strange that anyone would bother with a coordinate system that was moving relative to the earth, but for instance the frame of reference moving along with a train might be far more convenient for describing things happening inside the train.
Graphs of Motion: velocity
Motion with constant velocity
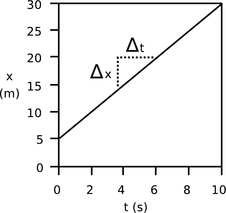
Figure o: Motion with constant velocity.
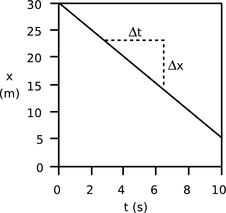
Figure p: Motion that decreases x is represented with negative values of Δ x and v.
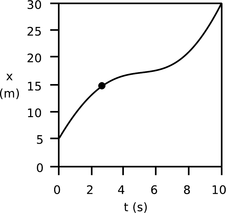
Figure q: Motion with changing velocity. How can we find the velocity at the time indicated by the dot?
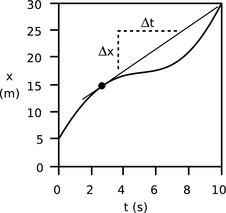
Figure r: The velocity at any given moment is defined as the slope of the tangent line through the relevant point on the graph.
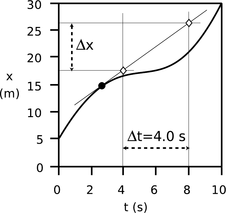
Figure s: Finding the velocity at the point indicated with the dot.
Figure t: Reversing the direction of motion.
In figure o, an object is moving at constant speed in one direction. We can tell this because every two seconds, its position changes by five meters.
In algebra notation, we'd say that the graph of x vs. t shows the same change in position, \(\Delta{}\)x = 5.0 m, over each interval of \(\Delta{}\)t = 2.0 s. The object's velocity or speed is obtained by calculating v = \(\Delta{}\)x / \(\Delta{}\)t = (5.0 m)/(2.0 s) = 2.5 m/s. In graphical terms, the velocity can be interpreted as the slope of the line. Since the graph is a straight line, it wouldn't have mattered if we'd taken a longer time interval and calculated v = \(\Delta{}\)x/ \(\Delta{}\)t = (10.0 m)/(4.0 s). The answer would still have been the same, 2.5 m/s.
Note that when we divide a number that has units of meters by another number that has units of seconds, we get units of meters per second, which can be written m/s. This is another case where we treat units as if they were algebra symbols, even though they're not.
In figure p, the object is moving in the opposite direction: as time progresses, its x coordinate decreases. Recalling the definition of the \(\Delta{}\) notation as "after minus before," we find that \(\Delta{}\)t is still positive, but \(\Delta{}\)x must be negative. The slope of the line is therefore negative, and we say that the object has a negative velocity, v = \(\Delta{}\)x/\(\Delta{}\)t = (-5.0 m)/(2.0 s) = -2.5 m/s. We've already seen that the plus and minus signs of \(\Delta{}\)x values have the interpretation of telling us which direction the object moved. Since \(\Delta{}\)t is always positive, dividing by \(\Delta{}\)t doesn't change the plus or minus sign, and the plus and minus signs of velocities are to be interpreted in the same way. In graphical terms, a positive slope characterizes a line that goes up as we go to the right, and a negative slope tells us that the line went down as we went to the right.
Motion with changing velocity
Now what about a graph like figure q? This might be a graph of a car's motion as the driver cruises down the freeway, then slows down to look at a car crash by the side of the road, and then speeds up again, disappointed that there is nothing dramatic going on such as games or babies trapped in their car seats. (Note that we are still talking about one-dimensional motion. Just because the graph is curvy doesn't mean that the car's path is curvy. The graph is not like a map, and the horizontal direction of the graph represents the passing of time, not distance.)
Figure q is similar to Figure o in that the object moves a total of 25.0 m in a period of 10.0 s, but it is no longer true that it makes the same amount of progress every second. There is no way to characterize the entire graph by a certain velocity or slope, because the velocity is different at every moment. It would be incorrect to say that because the car covered 25.0 m in 10.0 s, its velocity was 2.5 m/s. It moved faster than that at the beginning and end, but slower in the middle. There may have been certain instants at which the car was indeed going 2.5 m/s, but the speedometer swept past that value without "sticking," just as it swung through various other values of speed.
We assume that our speedometer tells us what is happening to the speed of our car at every instant, but how can we define speed mathematically in a case like this? We can't just define it as the slope of the curvy graph, because a curve doesn't have a single well-defined slope as does a line. A mathematical definition that corresponded to the speedometer reading would have to be one that attached a different velocity value to a single point on the curve, i.e., a single instant in time, rather than to the entire graph. If we wish to define the speed at one instant such as the one marked with a dot, the best way to proceed is illustrated in r, where we have drawn the line through that point called the tangent line, the line that "hugs the curve." We can then adopt the following definition of velocity:
Definition of velocity
The velocity of an object at any given moment is the slope of the tangent line through the relevant point on its x - t graph.
One interpretation of this definition is that the velocity tells us how many meters the object would have traveled in one second, if it had continued moving at the same speed for at least one second. To some people the graphical nature of this definition seems "inaccurate" or "not mathematical." The equation by itself, however, is only valid if the velocity is constant, and so cannot serve as a general definition.
Example 2
What is the velocity at the point shown with a dot on the graph?
First we draw the tangent line through that point. To find the slope of the tangent line, we need to pick two points on it. Theoretically, the slope should come out the same regardless of which two points we pick, but in practical terms we’ll be able to measure more accurately if we pick two points fairly far apart, such as the two white diamonds. To save work, we pick points that are directly above labeled points on the t axis, so that t = 4.0 s is easy to read off. One diamond lines up with x \(\approx{}\) 17.5 m, the other with x\(\approx{}\)26.5 m, so x = 9.0 m. The velocity is \(\Delta{}\)x/\(\Delta{}\)t = 2.2 m/s.
Conventions about graphing
The placement of t on the horizontal axis and x on the upright axis may seem like an arbitrary convention, or may even have disturbed you, since your algebra teacher always told you that x goes on the horizontal axis and y goes on the upright axis. There is a reason for doing it this way, however. In figure s, we have an object that reverses its direction of motion twice. It can only be in one place at any given time, but there can be more than one time when it is at a given place. For instance, this object passed through x = 17 m on three separate occasions, but there is no way it could have been in more than one place at t = 5.0 s. Resurrecting some terminology, we say that x is a function oft, but t is not a function of x. In situations such as this, there is a useful convention that the graph should be oriented so that any vertical line passes through the curve at only one point. Putting the x axis across the page and t upright would have violated this convention. To people who are used to interpreting graphs, a graph that violates this convention is as annoying as fingernails scratching on a chalkboard. We say that this is a graph of "x versus t." If the axes were the other way around, it would be a graph of "t versus x." Remember the "versus" terminology by visualizing the labels on the x and t axes and remembering that when you read, you go from left to right and from top to bottom.
The principle of inertia
Physical effects relate only to a change in velocity
Consider two statements of a kind that was at one time made with the utmost seriousness:
People like Galileo and Copernicus who say the earth is rotating must be crazy. We know the earth can’t be moving. Why, if the earth was really turning once every day, then our whole city would have to be moving hundreds of leagues in an hour. That’s impossible! Buildings would shake on their foundations. Gale-force winds would knock us over. Trees would fall down. The Mediterranean would come sweeping across the east coasts of Spain and Italy. And furthermore, what force would be making the world turn? All this talk of passenger trains moving at forty miles an hour is sheer hogwash! At that speed, the air in a passenger compartment would all be forced against the back wall. People in the front of the car would suffocate, and people at the back would die because in such concentrated air, they wouldn’t be able to expel a breath.
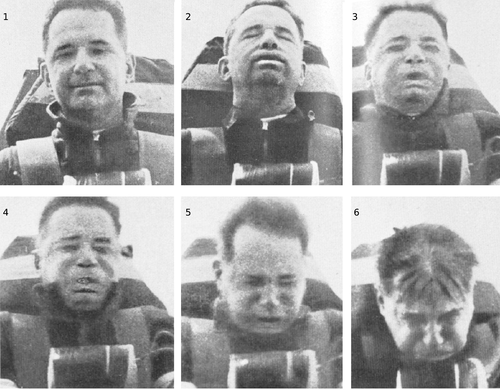
Figure u: This Air Force doctor volunteered to ride a rocket sled as a medical experiment. The obvious effects on his head and face are not because of the sled's speed but because of its rapid changes in speed: increasing in 2 and 3, and decreasing in 5 and 6. In 4 his speed is greatest, but because his speed is not increasing or decreasing very much at this moment, there is little effect on him.

Figure v: Why does Aristotle look so sad? Has he realized that his entire system of physics is wrong?
Some of the effects predicted in the first quote are clearly just based on a lack of experience with rapid motion that is smooth and free of vibration. But there is a deeper principle involved. In each case, the speaker is assuming that the mere fact of motion must have dramatic physical effects. More subtly, they also believe that a force is needed to keep an object in motion: the first person thinks a force would be needed to maintain the earth's rotation, and the second apparently thinks of the rear wall as pushing on the air to keep it moving.
Common modern knowledge and experience tell us that these people's predictions must have somehow been based on incorrect reasoning, but it is not immediately obvious where the fundamental flaw lies. It's one of those things a four-year-old could infuriate you by demanding a clear explanation of. One way of getting at the fundamental principle involved is to consider how the modern concept of the universe differs from the popular conception at the time of the Italian Renaissance. To us, the word "earth" implies a planet, one of the nine planets of our solar system, a small ball of rock and dirt that is of no significance to anyone in the universe except for members of our species, who happen to live on it. To Galileo's contemporaries, however, the earth was the biggest, most solid, most important thing in all of creation, not to be compared with the wandering lights in the sky known as planets. To us, the earth is just another object, and when we talk loosely about "how fast" an object such as a car "is going," we really mean the car object's velocity relative to the earth-object.

Figure w: The earth spins. People in Shanghai say they're at rest and people in Los Angeles are moving. Angelenos say the same about the Shanghainese.

Figure x: The jets are at rest. The Empire State Building is moving.
Motion is relative
According to our modern world-view, it really isn't that reasonable to expect that a special force should be required to make the air in the train have a certain velocity relative to our planet. After all, the "moving" air in the "moving" train might just happen to have zero velocity relative to some other planet we don't even know about. Aristotle claimed that things "naturally" wanted to be at rest, lying on the surface of the earth. But experiment after experiment has shown that there is really nothing so special about being at rest relative to the earth. For instance, if a mattress falls out of the back of a truck on the freeway, the reason it rapidly comes to rest with respect to the planet is simply because of friction forces exerted by the asphalt, which happens to be attached to the planet.
Galileo's insights are summarized as follows:
The principle of inertia
No force is required to maintain motion with constant velocity in a straight line, and absolute motion does not cause any observable physical effects.
There are many examples of situations that seem to disprove the principle of inertia, but these all result from forgetting that friction is a force. For instance, it seems that a force is needed to keep a sailboat in motion. If the wind stops, the sailboat stops too. But the wind's force is not the only force on the boat; there is also a frictional force from the water. If the sailboat is cruising and the wind suddenly disappears, the backward frictional force still exists, and since it is no longer being counteracted by the wind's forward force, the boat stops. To disprove the principle of inertia, we would have to find an example where a moving object slowed down even though no forces whatsoever were acting on it.
Addition of velocities
Addition of velocities to describe relative motion
Since absolute motion cannot be unambiguously measured, the only way to describe motion unambiguously is to describe the motion of one object relative to another. Symbolically, we can write \(v_{PQ}\) for the velocity of object P relative to object Q.
Velocities measured with respect to different reference points can be compared by addition. In the figure below, the ball's velocity relative to the couch equals the ball's velocity relative to the truck plus the truck's velocity relative to the couch:
$$v_{BC} = v_{BT} + v_{TC}$$ $$= 5 cm/s + 10 cm/s$$ $$= 15 cm/s$$
The same equation can be used for any combination of three objects, just by substituting the relevant subscripts for B, T, and C. Just remember to write the equation so that the velocities being added have the same subscript twice in a row. In this example, if you read off the subscripts going from left to right, you get BC...= ... BTTC. The fact that the two "inside" subscripts on the right are the same means that the equation has been set up correctly. Notice how subscripts on the left look just like the subscripts on the right, but with the two T's eliminated.
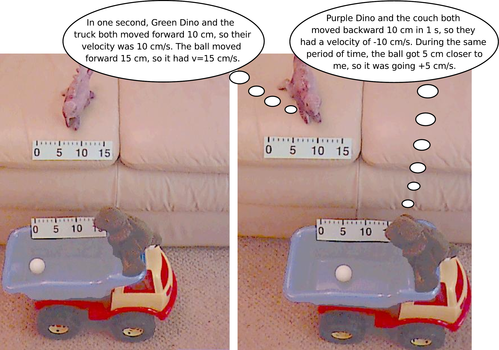
Figure y: These two highly competent physicists disagree on absolute velocities, but they would agree on relative velocities. Purple Dino considers the couch to be at rest, while Green Dino thinks of the truck as being at rest. They agree, however, that the truck's velocity relative to the couch is \(v_{TC}\)=10 cm/s, the ball's velocity relative to the truck is \(v_{BT}\)=5 cm/s, and the ball's velocity relative to the couch is \(v_{BC}\)= \(v_{BT}\) + \(v_{TC}\) = 15 cm/s.
Negative velocities in relative motion
The discussion of how to interpret positive and negative signs of velocity may have left you wondering why we should bother. Why not just make velocity positive by definition? The original reason why negative numbers were invented was that bookkeepers decided it would be convenient to use the negative number concept for payments to distinguish them from receipts. It was just plain easier than writing receipts in black and payments in red ink. After adding up your month's positive receipts and negative payments, you either got a positive number, indicating profit, or a negative number, showing a loss. You could then show that total with a high-tech “+” or “-” sign, instead of looking around for the appropriate bottle of ink.
Nowadays we use positive and negative numbers for all kinds of things, but in every case the point is that it makes sense to add and subtract those things according to the rules you learned in grade school, such as “minus a minus makes a plus, why this is true we need not discuss.” Adding velocities has the significance of comparing relative motion, and with this interpretation negative and positive velocities can be used within a consistent framework. For example, the truck's velocity relative to the couch equals the truck's velocity relative to the ball plus the ball's velocity relative to the couch:
$$v_{TC} =v_{TB}+v_{BC} =-5 cm/s+15 cm/s =10 cm/s$$
If we didn't have the technology of negative numbers, we would have had to remember a complicated set of rules for adding velocities: (1) if the two objects are both moving forward, you add, (2) if one is moving forward and one is moving backward, you subtract, but (3) if they're both moving backward, you add. What a pain that would have been.
Example 3: Airspeed
On June 1, 2009, Air France flight 447 disappeared without warning over the Atlantic Ocean. All 232 people aboard were killed. Investigators believe the disaster was triggered because the pilots lost the ability to accurately determine their speed relative to the air. This is done using sensors called Pitot tubes, mounted outside the plane on the wing. Automated radio signals showed that these sensors gave conflicting readings before the crash, possibly because they iced up. For fuel efficiency, modern passenger jets fly at a very high altitude, but in the thin air they can only fly within a very narrow range of speeds. If the speed is too low, the plane stalls, and if it's too high, it breaks up. If the pilots can't tell what their airspeed is, they can't keep it in the safe range.
Many people's reaction to this story is to wonder why planes don't just use GPS to measure their speed. One reason is that GPS tells you your speed relative to the ground, not relative to the air. Letting P be the plane, A the air, and G the ground, we have
$$v_{PG} = v_{PA}+v_{AG} $$
where \(v_{PG}\) (the “true ground speed”) is what GPS would measure, \(v_{PA}\) (“airspeed”) is what's critical for stable flight, and \(v_{AG}\) is the velocity of the wind relative to the ground 9000 meters below. Knowing \(v_{PG}\) isn't enough to determine \(v_{PA}\) unless \(v_{AG}\) is also known.

Figure z: 1. The aircraft before the disaster. 2. A Pitot tube. 3. The flight path of flight 447. 4. Wreckage being recovered.
Graphs of velocity versus time
Since changes in velocity play such a prominent role in physics, we need a better way to look at changes in velocity than by laboriously drawing tangent lines on x-versus-t graphs. A good method is to draw a graph of velocity versus time. The figures show the x-t and v-t graphs that might be produced by a car starting from a traffic light, speeding up, cruising for a while at constant speed, and finally slowing down for a stop sign. If you have an air freshener hanging from your rear-view mirror, then you will see an effect on the air freshener during the beginning and ending periods when the velocity is changing, but it will not be tilted during the period of constant velocity represented by the flat plateau in the middle of the v-t graph.
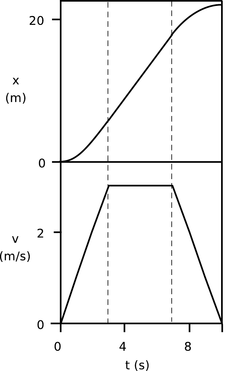
Figure aa: Graphs of xand v versus t for a car accelerating away from a traffic light, and then stopping for another red light.
Students often mix up the things being represented on these two types of graphs. For instance, many students looking at the top graph say that the car is speeding up the whole time, since “the graph is becoming greater.” What is getting greater throughout the graph is x, not v.
Similarly, many students would look at the bottom graph and think it showed the car backing up, because “it's going backwards at the end.” But what is decreasing at the end is v, not x. Having both the x-t and v-t graphs in front of you like this is often convenient, because one graph may be easier to interpret than the other for a particular purpose. Stacking them like this means that corresponding points on the two graphs' time axes are lined up with each other vertically. However, one thing that is a little counter-intuitive about the arrangement is that in a situation like this one involving a car, one is tempted to visualize the landscape stretching along the horizontal axis of one of the graphs. The horizontal axes, however, represent time, not position. The correct way to visualize the landscape is by mentally rotating the horizon 90 degrees counterclockwise and imagining it stretching along the upright axis of the x-t graph, which is the only axis that represents different positions in space.
Applications of calculus
The integral symbol, ∫ , in the heading indicates that it is meant to be read by students in calculus-based physics. The calculus-related materials are meant to be usable by students who are taking calculus concurrently. This is therefore not much more than a quick preview of calculus, to help you relate what you're learning.
Newton was the first person to figure out the tangent-line definition of velocity for cases where the x-t graph is nonlinear. Before Newton, nobody had conceptualized the description of motion in terms of x-t and v-t graphs. In addition to the graphical techniques discussed, Newton also invented a set of symbolic techniques called calculus. If you have an equation for x in terms of t, calculus allows you, for instance, to find an equation for v in terms of t. In calculus terms, we say that the function v(t) is the derivative of the function x(t). In other words, the derivative of a function is a new function that tells how rapidly the original function was changing. We now use neither Newton's name for his technique (he called it “the method of fluxions”) nor his notation. The more commonly used notation is due to Newton's German contemporary Leibnitz, whom the English accused of plagiarizing the calculus from Newton. In the Leibnitz notation, we write
$$v=dx/dt$$
to indicate that the function v(t) equals the slope of the tangent line of the graph of x(t) at every time t. The Leibnitz notation is meant to evoke the delta notation, but with a very small time interval. Because the dx and dt are thought of as very small Δ x's and Δ t's, i.e., very small differences, the part of calculus that has to do with derivatives is called differential calculus.
Differential calculus consists of three things:
-
The concept and definition of the derivative.
-
The Leibnitz notation described above.
-
A set of rules that allows you to find an equation for the derivative of a given function. For instance, if you happened to have a situation where the position of an object was given by the equation x=2t\(^{7}\), you would be able to use those rules to find dx/dt=14t\(^{6}\).